Bonjour à toutes et à tous, Aujourd’hui, vous allez apprendre à identifier des forces. Pourquoi? Et bien, pour la simple et excellente raison que les…
pour réussir en physique

Bonjour à toutes et à tous, Aujourd’hui, vous allez apprendre à identifier des forces. Pourquoi? Et bien, pour la simple et excellente raison que les…
Bonjour à toutes et à tous, Comment réussir tous ses exercices de dynamique? Voilà une question de premier intérêt à laquelle je vais tenter de…
Exercice 1 Que se passe-t-il lorsqu’une onde (plane ou circulaire) rencontre une petite digue possédant une ouverture comme représenté sur le schéma ci-dessous ? Exercice…
Propagation des ondes Enoncé du principe de Huygens : Lorsqu’une onde se propage, chaque élément de surface atteint par cette onde, se comporte comme une…
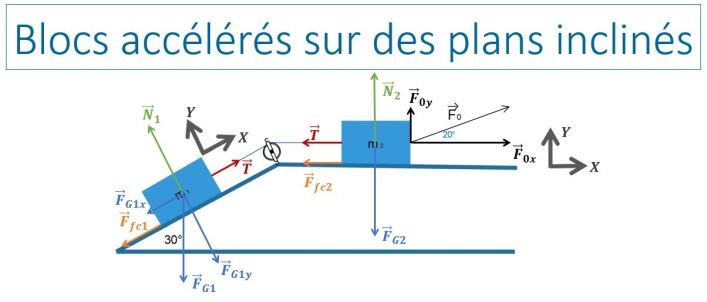
Bonjour à toutes et à tous, pour ceux d’entre vous qui peinent à résoudre des exercices plus complexes (avec des forces de frottement par exemple),…
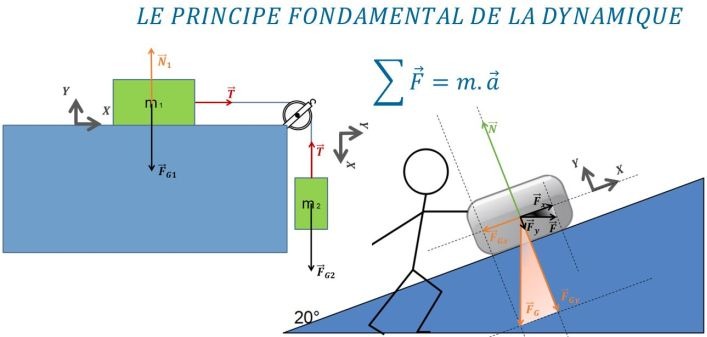
Cet article présente le déroulement d’un exercice dans lequel on utilise le principe fondamental de la dynamique (noté par la suite PFD) pour déduire la…
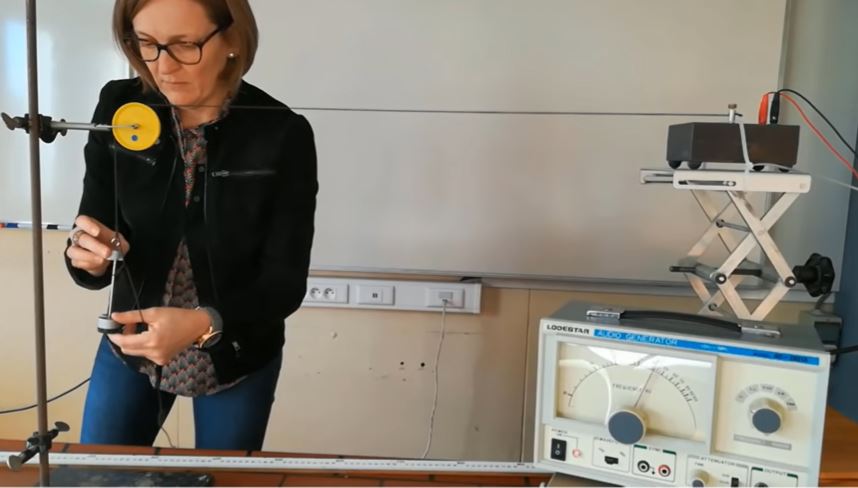
Dans cet article, j’explique trois expériences qui peuvent être réalisées dans une corde fixée à ses deux extrémités et j’en interprète les résultats à l’aide…
Essayez de faire tous ces exercices, rien de tel que s’entrainer pour ensuite performer! Bon travail! Remarque importante : On supposera dans tous les exercices…
Qu’est-ce que le MRUA? Un MRUA est un Mouvement Rectiligne Uniformément Accéléré. Il s’agit donc d’un mouvement qui se déroule: de façon rectiligne: càd en…
Une onde est une perturbation qui se propage sans déplacement de matière. Voilà qui est dit! Bon, ok, super, mais concrètement, ça veut dire quoi…