Bienvenue sur mon blog : ‘Osez réussir en Physique’! Cliquez ici pour télécharger mon livret ! 🙂 Il vous explique comment reconnaitre et faire parler…
pour réussir en physique

Bienvenue sur mon blog : ‘Osez réussir en Physique’! Cliquez ici pour télécharger mon livret ! 🙂 Il vous explique comment reconnaitre et faire parler…
Une onde est une perturbation qui se propage sans déplacement de matière. Voilà qui est dit! Bon, ok, super, mais concrètement, ça veut dire quoi…
Exercice 1: Deux objets ponctuels se déplacent l’un vers l’autre simultanément Lors d’un tournoi, deux cavaliers s’affrontent dans un face à face, lance à la…
Lire plus de commentaires sur Amazon Présentation de l’auteur Charles Pépin est un philosophe, écrivain et journaliste français né en 1973. Ses romans sont traduits…
Qu’est-ce qu’un mouvement rectiligne uniforme, le fameux MRU? Un mouvement rectiligne, c’est un mouvement pour lequel on interdit le changement de direction. Bref, on ne…
En physique, la notion vectorielle est à la base de bien des déboires, et ce, jusqu’en première bac! Pourquoi? Probablement parce que les élèves ne…
Qu’est-ce qu’un référentiel en physique? Un référentiel en physique, est un solide, un point de l’espace par rapport auquel on repère un mouvement. Ce point…
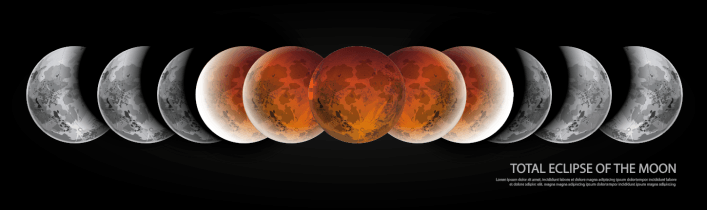
Le 27 juillet dernier, certains d’entre vous ont eu la chance d’admirer une éclipse de Lune! La question est la suivante: « Pourquoi diable la Lune…
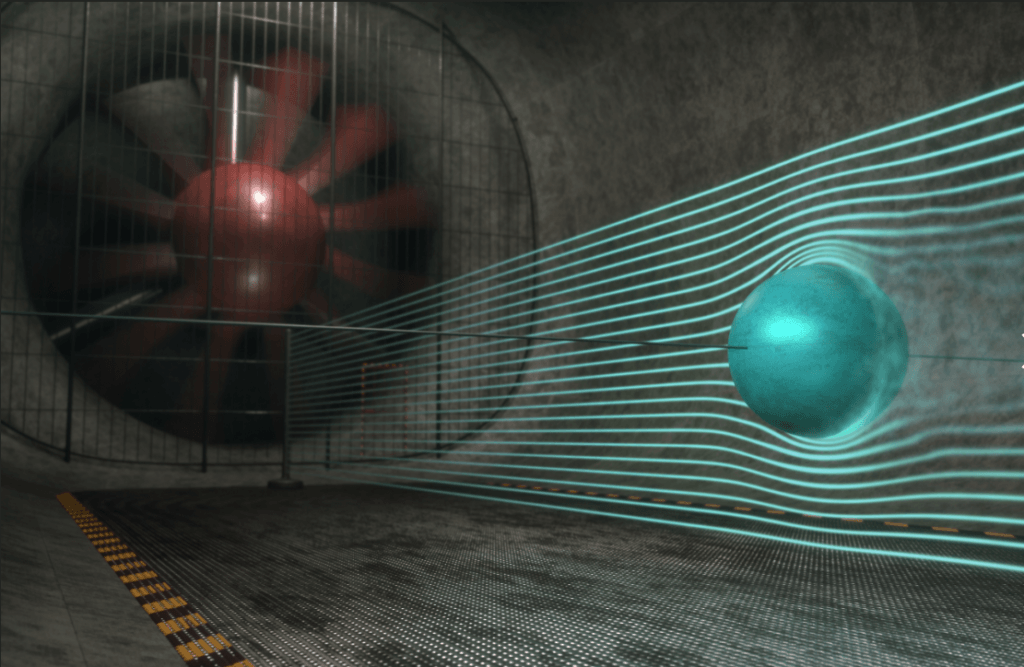
Hello tout le monde, Si vous avez lu mon post précédent (Revoir ici), la crise de trainée n’a plus de secret pour vous. Allons un…
Etes-vous conscients de la magie d’un coup franc ou même d’un dégagement de gardien de but? Si votre réponse est non, jetez un œil à…